
หุ่นยนต์ที่ใช้วิชันซิสเต็ม
2D VGR ซีรีส์
หุ่นยนต์ที่ใช้วิชันซิสเต็ม 2D VGR ซีรีส์

ใหม่ หุ่นยนต์ที่ใช้วิชันซิสเต็มที่มาพร้อมความเสถียรมากขึ้น
การสร้างภาพที่เหมาะสมที่สุดด้วยหุ่นยนต์ที่ใช้วิชันซิสเต็ม
- ไฟที่สว่างและให้แสงสม่ำเสมอแม้กับมุมมองภาพที่กว้าง
- การรองรับสำหรับการเปลี่ยนพาเลทและเครื่องมือหลายชนิด
- ฮาร์ดแวร์ที่เหมาะสมที่สุดสำหรับการหยิบสินค้าด้วยมือจับและแบบยึดกับที่

วิชันซิสเต็มสำหรับงานหยิบจับและวางชิ้นงาน พร้อมคุณสมบัติการเชื่อมต่อโดยตรงและการปรับแต่งค่าแบบอัตโนมัติร่วมกับหุ่นยนต์ของผู้ผลิตชั้นนำหลายราย

คุณลักษณะ
ไฟที่สว่างและให้แสงสม่ำเสมอแม้กับมุมมองภาพที่กว้าง
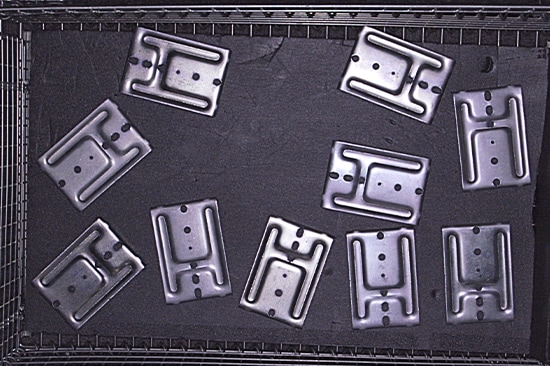
มุมมองภาพที่กว้างขึ้นอาจทำให้ความสว่างไม่สม่ำเสมอและมองเห็นความแตกต่างของความเข้มระหว่างจุดศูนย์กลางกับขอบของหน้าจอได้อย่างชัดเจน เทคโนโลยีการถ่ายภาพขั้นสูง เช่น ไฟแบบโอเวอร์ไดรฟ์ด้วยวงแหวนอัจฉริยะความเข้มสูงและการถ่ายภาพ HDR จะช่วยลดความแตกต่างดังกล่าวได้แม้ในมุมมองภาพที่กว้าง
ก่อน

หลัง
การรองรับสำหรับการเปลี่ยนพาเลทและเครื่องมือหลายชนิด
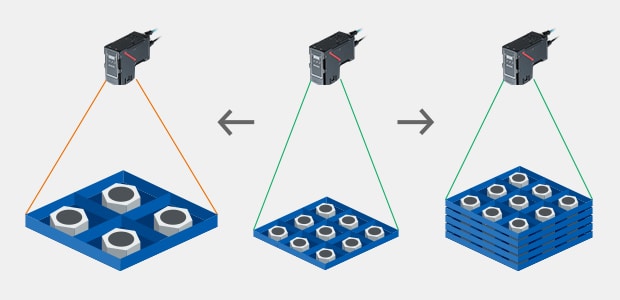
ZoomTrax จะเปลี่ยนมุมมองภาพให้เหมาะกับขนาดของชิ้นงานโดยอัตโนมัติ และการโฟกัสอัตโนมัติจะช่วยให้จัดการกับพาเลทที่มีความสูงแตกต่างกันได้ ทำให้ใช้งานในสภาพแวดล้อมการผลิตที่หลากหลายได้โดยไม่ต้องเปลี่ยนเลนส์
ฮาร์ดแวร์ที่เหมาะสมที่สุดสำหรับการหยิบด้วยมือจับ

การประยุกต์ใช้งานมือจับมีความหลากหลายมากขึ้นได้ด้วยการเชื่อมต่อ PoE บนหุ่นยนต์ ความทนทานต่อสภาพแวดล้อม IP67 และการออกแบบ C-mount น้ำหนักเบา
-
1เชื่อมต่อกับอุปกรณ์สายไฟภายในซึ่งป้องกันการแตกหักของสายไฟ
-
2ระดับการป้องกัน IP67 ที่ทนทาน
-
3ตัวเลือกการออกแบบ C-mount น้ำหนักเบา
โดดเด่นด้านการใช้งานร่วมกันได้กับผู้ผลิตหุ่นยนต์จากหลากหลายบริษัท

รองรับผู้ผลิตหุ่นยนต์หลากหลายแบรนด์
เชื่อมต่อกับคอนโทรลเลอร์ของหุ่นยนต์แบบมาตรฐานโดยตรงได้ด้วยการเลือกจากรายชื่อผู้ผลิตหุ่นยนต์ที่เป็นที่รู้จัก ทั้งยังสามารถตั้งค่าหุ่นยนต์ที่ใช้วิชันซิสเต็มได้ภายในอินเตอร์เฟซเดียว แม้จะใช้งานหุ่นยนต์ต่างชนิดกันในกระบวนการที่แตกต่างกันก็ตาม
| ผู้ผลิตหุ่นยนต์ที่รองรับ | |||||||
|---|---|---|---|---|---|---|---|
| ผู้ผลิตหุ่นยนต์ที่รองรับ | ABB | ABB | DAIHEN | DENSO | EPSON | FANUC | HIRATA |
| DAIHEN | IAI | JANOME | KAWASAKI | KUKA | MITSUBISHI | NACHI | |
| DENSO | STAUBLI | SHIBAURA MACHINE | UNIVERSAL ROBOTS | YAMAHA | YASKAWA MOTOMAN | Custom | |
| EPSON | |||||||
| FANUC | |||||||
| HIRATA | |||||||
| IAI | |||||||
| JANOME | |||||||
| KAWASAKI | |||||||
| KUKA | |||||||
| MITSUBISHI | |||||||
| NACHI | |||||||
| STAUBLI | |||||||
| SHIBAURA MACHINE | |||||||
| UNIVERSAL ROBOTS | |||||||
| YAMAHA | |||||||
| YASKAWA MOTOMAN | |||||||
| Custom | |||||||
การปรับเทียบที่รวดเร็วและแม่นยำสำหรับผู้ใช้ทุกคน
การสอบเทียบอัตโนมัติ
การปรับเทียบที่ใช้เวลานานสามารถทำได้โดยอัตโนมัติเพียงคลิกครั้งเดียว ช่วยให้ผู้ใช้ทุกคนมั่นใจได้ถึงความแม่นยำในระดับเดียวกันและความเสถียรในการเริ่มต้นใช้งาน
ก่อน

ปัญหาที่พบบ่อยของวิธีการทั่วไป (วิธีปรับด้วยตัวเอง)
- ความแม่นยำแตกต่างกันไปตามผู้ปฏิบัติงาน
- หากติดตั้งคลาดเคลื่อนจะปรับใหม่ยาก
- การติดตั้งให้เหมือนเดิมในสถานที่ติดตั้งใหม่ทำได้ยากเนื่องจากเงื่อนไขของสภาพแวดล้อมที่ต่างกัน
หลัง
วิธีแก้ปัญหาด้วยหุ่นยนต์ ที่ใช้วิชันซิสเต็มของ KEYENCE
- ความแม่นยำสูงโดยไม่ขึ้นอยู่กับผู้ปฏิบัติงาน
- การสอบเทียบอย่างรวดเร็วเพื่อแก้ไขปัญหาที่เกิดจาก การจัดตำแหน่งผิดพลาด
- การดำเนินงานที่ง่ายดายด้วยการคลิกเพียงครั้งเดียว
การรองรับการใช้งานหุ่นยนต์ที่ง่ายดาย
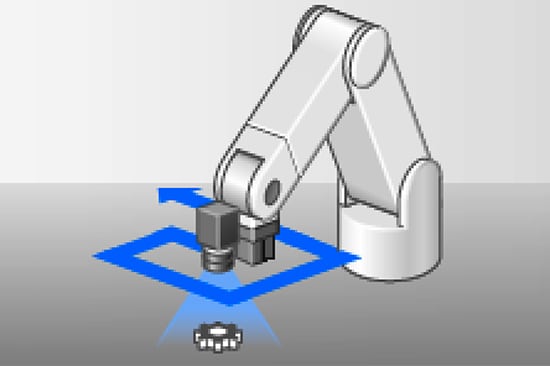
คุณสามารถสร้างโปรแกรมหุ่นยนต์ได้โดยอัตโนมัติและง่ายดายด้วยการระบุขั้นตอนการทำงาน
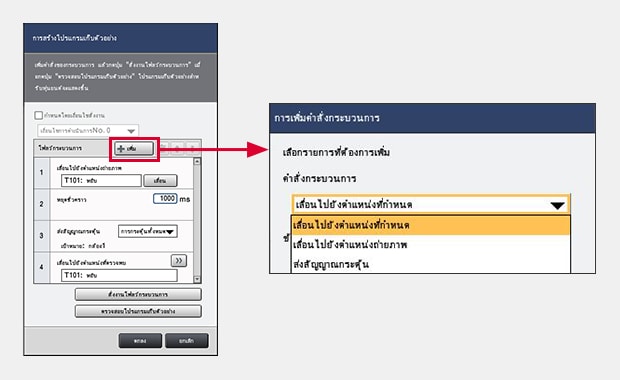
ตั้งค่าได้ง่ายเพียงเลือกการทำงานของหุ่นยนต์ที่ต้องการ

ภาษาโปรแกรมเฉพาะของผู้ผลิตหุ่นยนต์
เครื่องมือค้นหาที่ทรงพลังเพื่อประสิทธิภาพด้านความเร็วและความแม่นยำที่น่าประทับใจ

การตรวจจับตำแหน่งที่มีเสถียรภาพซึ่งพร้อมให้บริการโดยผู้ผลิตที่เชี่ยวชาญด้านวิชันซิสเต็มเท่านั้น!
สามารถทำการค้นหาได้อย่างแม่นยำถึงแม้สภาพของการจับภาพจะเปลี่ยนไปจากภาพที่ได้ทำการบันทึกไว้
การตรวจสอบพร้อมกันหลากหลายรูปแบบ
เพิ่มการตรวจสอบชนิดอื่นๆ ได้ตามต้องการ ซึ่งรวมไปถึงการรู้จำตัวอักษร การตรวจสอบรูปร่าง และการตรวจสอบความแตกต่างของชนิดผลิตภัณฑ์
การตรวจสอบการระบุ (OCR, โค้ด 1D/2D)

การตรวจจับตำแหน่งและการอ่านตัวอักษรจะกระทำไปพร้อมกัน
-
1การรู้จำตัวอักษร
การตรวจสอบรูปร่าง

ผลิตภัณฑ์จะได้รับการตรวจสอบหลังจากที่หุ่นยนต์หยิบขึ้นมาและจะถูกปฏิเสธเมื่อพบข้อบกพร่อง
-
1ตำหนิบนพื้นผิว
